Công nghệ GPS trên drone: Cách định vị giúp drone bay ổn định và chính xác
Khi nói đến khả năng bay ổn định của drone, nhiều người thường chỉ tập trung vào motor hoặc bộ điều khiển, nhưng thực tế GPS drone mới là “trục xương sống” của toàn bộ hệ thống bay hiện đại. Nếu không có GPS, drone gần như chỉ là một thiết bị bay thủ công, rất khó kiểm soát trong môi trường thực tế.
Điểm đặc biệt là GPS không hoạt động một mình, mà là một phần trong hệ thống định vị phức hợp, nơi nhiều cảm biến cùng phối hợp để giúp drone xác định chính xác vị trí, hướng và trạng thái chuyển động.
Hiểu GPS không chỉ là hiểu vị trí, mà là hiểu cách drone “nhận thức không gian”.
GPS drone là gì và vai trò trong hệ thống bay
GPS trên drone thực chất là một phần của hệ thống GNSS (Global Navigation Satellite System), bao gồm nhiều mạng vệ tinh như GPS (Mỹ), GLONASS (Nga), Galileo (EU) và BeiDou (Trung Quốc). Drone hiện đại thường sử dụng multi-GNSS để tăng độ chính xác và độ ổn định.
Khi drone bật lên, module GNSS sẽ bắt tín hiệu từ các vệ tinh. Mỗi vệ tinh gửi dữ liệu về vị trí và thời gian cực kỳ chính xác. Dựa vào đó, drone tính toán khoảng cách đến từng vệ tinh.
Vai trò của GPS không chỉ dừng lại ở việc “xác định vị trí”, mà còn là cơ sở cho nhiều chức năng quan trọng:
- Giữ vị trí (position hold)
- Xác định hướng bay (heading kết hợp compass)
- Hỗ trợ Return to Home (RTH)
- Điều khiển bay tự động (waypoint, tracking)
Một điểm quan trọng là GPS chỉ cung cấp tọa độ tuyệt đối, nhưng để drone bay ổn định, nó cần thêm dữ liệu về chuyển động tức thời từ IMU.
GPS cho drone biết “ở đâu”, IMU cho drone biết “đang làm gì”.
Cách GPS drone hoạt động trong thực tế
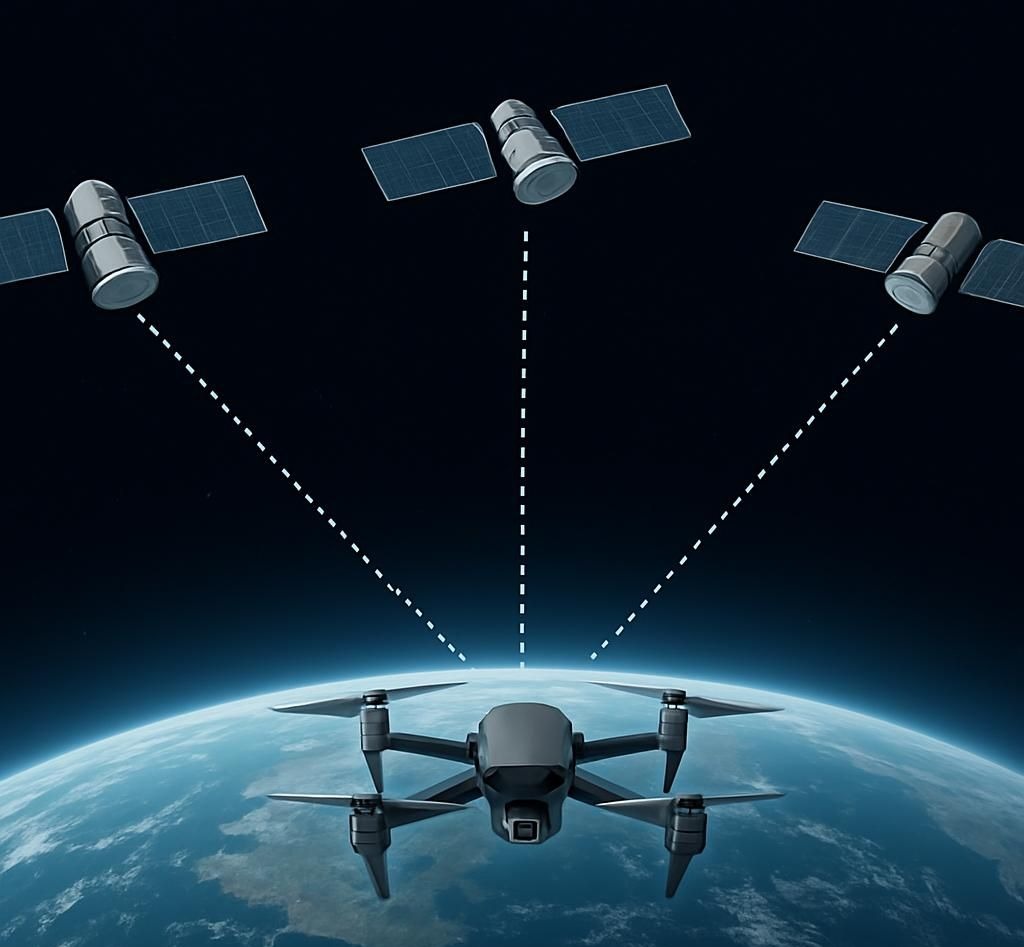
Nguyên lý cốt lõi của GPS là trilateration. Drone nhận tín hiệu từ nhiều vệ tinh và tính toán khoảng cách dựa trên thời gian tín hiệu truyền đến. Khi có ít nhất 4 vệ tinh, drone có thể xác định vị trí trong không gian 3D.
Tuy nhiên, trong thực tế, hệ thống không đơn giản như vậy. Tín hiệu GPS có thể bị sai lệch do:
- Trễ tín hiệu (signal delay)
- Nhiễu khí quyển
- Phản xạ tín hiệu (multipath)
Để xử lý các sai số này, flight controller sử dụng các thuật toán lọc, phổ biến nhất là Kalman Filter (EKF – Extended Kalman Filter). Thuật toán này giúp kết hợp dữ liệu từ GPS với IMU để tạo ra ước lượng chính xác hơn về vị trí và vận tốc.
Ví dụ, GPS có thể cập nhật vị trí với tần số thấp (1–10Hz), trong khi IMU hoạt động với tần số cao (100–1000Hz). EKF sẽ dùng IMU để “lấp khoảng trống” giữa các lần cập nhật GPS.
Ngoài ra, khi drone bay thấp, hệ thống vision sensor (camera + optical flow) sẽ hỗ trợ giữ vị trí. Điều này đặc biệt quan trọng khi GPS yếu hoặc không ổn định.
GPS cung cấp dữ liệu “chậm nhưng chính xác”, IMU cung cấp dữ liệu “nhanh nhưng có drift” – và EKF là thứ kết nối cả hai.
Các loại hệ thống định vị trên drone hiện nay
Drone hiện đại không phụ thuộc vào một hệ thống duy nhất, mà sử dụng multi-GNSS để tăng độ tin cậy. Điều này giúp giảm thời gian lock vệ tinh và cải thiện độ chính xác trong môi trường khó.
Các hệ thống định vị phổ biến:
- GPS: hệ thống cơ bản, phổ biến toàn cầu
- GLONASS: bổ sung vệ tinh, tăng độ phủ
- Galileo: độ chính xác cao hơn trong một số điều kiện
- BeiDou: mạnh ở khu vực châu Á
Việc kết hợp nhiều hệ thống giúp drone có thể kết nối với nhiều vệ tinh hơn (thường 15–30 vệ tinh), từ đó cải thiện độ chính xác xuống mức ~1–3 mét.
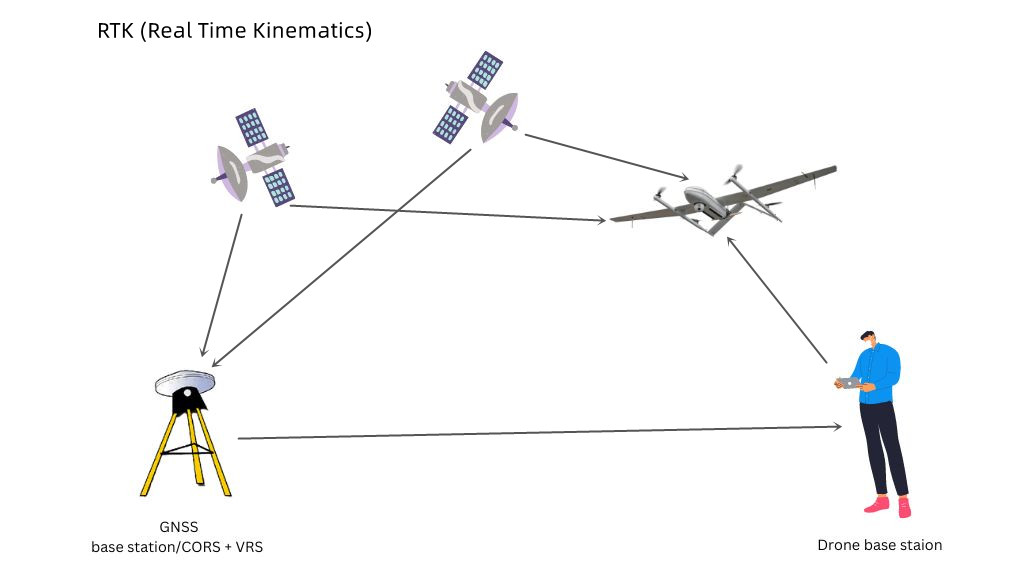
Một số drone cao cấp còn sử dụng RTK (Real-Time Kinematic), cho phép định vị chính xác đến centimet. Đây là công nghệ thường dùng trong khảo sát và mapping.
Nếu bạn muốn hiểu rõ cách các drone hiện đại tận dụng GNSS, bạn có thể tham khảo thêm bài review DJI Mini 2.
Ứng dụng thực tế của GPS drone trong bay và quay phim
Trong thực tế, GPS là nền tảng cho hầu hết các tính năng “thông minh” của drone. Khi drone có tín hiệu GPS tốt, nó có thể giữ vị trí cực kỳ ổn định, ngay cả khi có gió nhẹ.
Điều này đặc biệt quan trọng khi quay video. Một cảnh quay mượt đòi hỏi drone phải giữ vị trí chính xác, nếu không sẽ bị rung hoặc trôi khung hình.
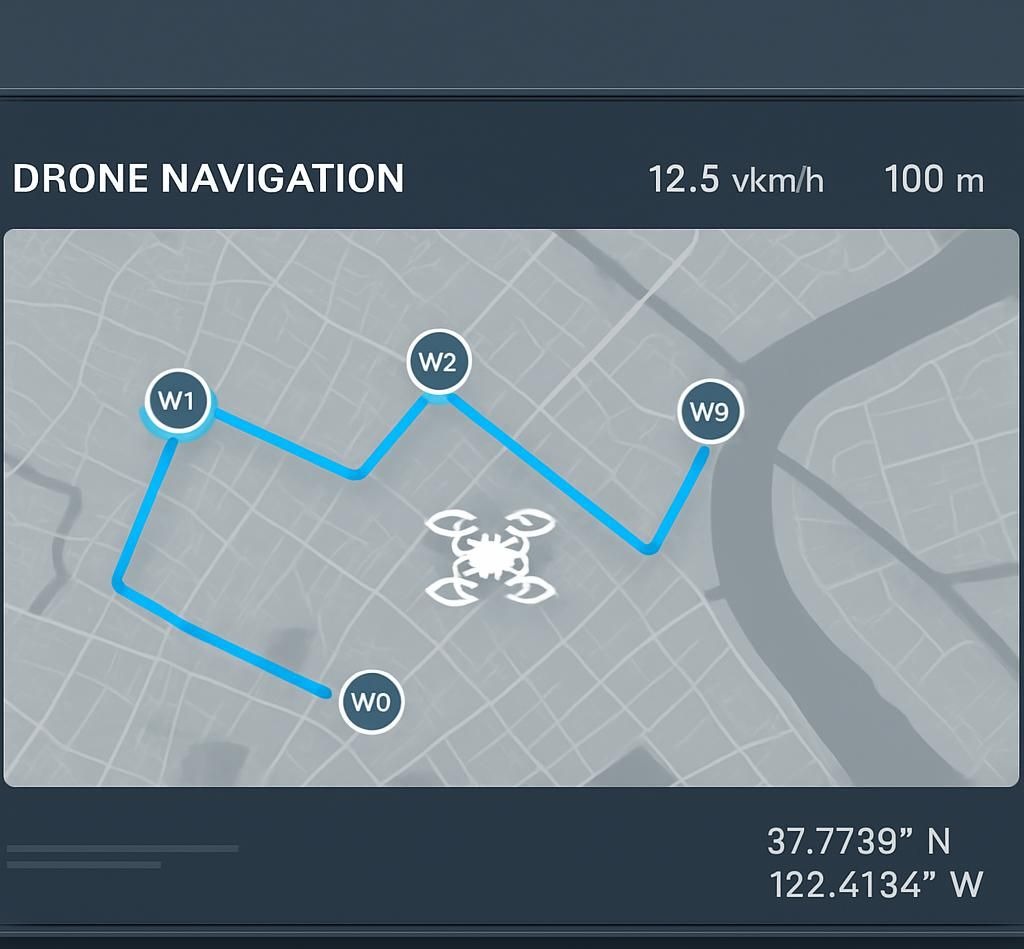
Ngoài ra, GPS cho phép drone thực hiện các chuyến bay tự động. Ví dụ, với waypoint, drone có thể bay theo một lộ trình đã lập sẵn. Với follow me, drone sẽ theo sát người điều khiển dựa trên tín hiệu GPS của thiết bị.
Một tính năng cực kỳ quan trọng là Return to Home. Khi mất tín hiệu hoặc pin yếu, drone sẽ sử dụng GPS để quay về điểm xuất phát. Tuy nhiên, tính năng này chỉ chính xác nếu GPS ổn định.
GPS biến drone thành một hệ thống bay bán tự động thay vì chỉ là thiết bị điều khiển từ xa.

Các lỗi liên quan đến GPS drone và cách xử lý
Dù công nghệ hiện đại, GPS vẫn có những giới hạn. Một lỗi phổ biến là mất tín hiệu GPS, khiến drone chuyển sang chế độ ATTI (Attitude mode). Khi đó, drone không giữ vị trí và dễ bị trôi.
Nguyên nhân thường là môi trường có nhiều vật cản như nhà cao tầng hoặc rừng. Trong trường hợp này, bạn nên giảm độ cao và di chuyển ra khu vực thoáng hơn.
Một vấn đề khác là sai lệch vị trí do hiện tượng multipath. Tín hiệu GPS bị phản xạ từ bề mặt như tường hoặc mặt nước, khiến drone tính toán sai vị trí.
Ngoài ra, compass sai cũng có thể khiến GPS hoạt động không chính xác. Vì vậy, nếu gặp lỗi định vị, bạn nên kiểm tra lại hệ thống cảm biến. Bạn có thể tham khảo thêm bài calibrate drone chuẩn nhất để xử lý.
Những yếu tố ảnh hưởng đến độ chính xác của GPS drone
Độ chính xác của GPS phụ thuộc vào nhiều yếu tố, không chỉ là số lượng vệ tinh. Một yếu tố quan trọng là HDOP (Horizontal Dilution of Precision), phản ánh độ phân bố của vệ tinh trên bầu trời.
Nếu các vệ tinh tập trung ở một khu vực, độ chính xác sẽ kém hơn so với khi chúng phân bố đều. Đây là lý do vì sao đôi khi bạn có nhiều vệ tinh nhưng vẫn không đạt độ chính xác cao.
Môi trường cũng ảnh hưởng lớn. Trong đô thị, hiện tượng “urban canyon” (hiệu ứng hẻm đô thị) khiến tín hiệu bị phản xạ và sai lệch. Trong rừng, cây cối làm giảm cường độ tín hiệu.
Ngoài ra, nhiễu điện từ từ các thiết bị xung quanh cũng có thể ảnh hưởng đến compass và gián tiếp làm giảm độ chính xác của GPS.
Nếu bạn bay trong môi trường phức tạp, bạn nên giữ khoảng cách an toàn và kiểm soát tốc độ. Bạn có thể đọc thêm bài cách tránh va chạm drone để giảm rủi ro.
Sai lầm phổ biến khi sử dụng GPS drone
Một sai lầm phổ biến là quá phụ thuộc vào GPS mà bỏ qua quan sát thực tế. GPS có thể sai lệch trong một số tình huống, và nếu bạn không nhận ra, hậu quả có thể rất lớn.
Những sai lầm cần tránh:
- Cất cánh khi chưa lock đủ vệ tinh
- Tin hoàn toàn vào RTH mà không kiểm tra môi trường
- Bay trong khu vực nhiễu mạnh
- Không calibrate compass khi cần thiết
- Bay quá xa khi tín hiệu không ổn định
Những lỗi này thường không gây vấn đề ngay lập tức, nhưng chỉ cần một tình huống xấu là có thể dẫn đến mất kiểm soát.
Nếu bạn muốn nâng cao kỹ năng tổng thể, bạn có thể tham khảo thêm bài cách bay drone an toàn để hiểu rõ hơn cách kiểm soát thiết bị.
Kết luận về công nghệ GPS drone theo góc nhìn thực tế
GPS là nền tảng quan trọng giúp drone bay ổn định và thông minh hơn, nhưng nó không phải là hệ thống hoàn hảo. Để sử dụng hiệu quả, bạn cần hiểu rõ cách nó hoạt động và giới hạn của nó.
Khi kết hợp đúng giữa GPS, IMU và các cảm biến khác, drone có thể đạt độ ổn định rất cao. Ngược lại, nếu phụ thuộc hoàn toàn vào GPS mà không hiểu nguyên lý, bạn sẽ dễ gặp rủi ro.
GPS giúp drone biết đường, nhưng người điều khiển mới là người quyết định chuyến bay.


